With unmanned aerial vehicles now common across modern military and security operations, planners face increasing pressure to assign heterogeneous drone swarms to complex mission sets without wasting time or resources. A new study in the journal Defence Technology reports an energy learning hyper-heuristic algorithm that tackles cooperative task assignment under multiple operational constraints.
A team led by Professor Mou Chen at Nanjing University of Aeronautics and Astronautics has developed an energy learning hyper-heuristic, or EL-HH, framework to handle these demanding scenarios. The approach targets mixed fleets of UAVs that differ in payload, performance and mission roles, and must satisfy time windows, task priorities and platform limits while operating in cluttered environments.
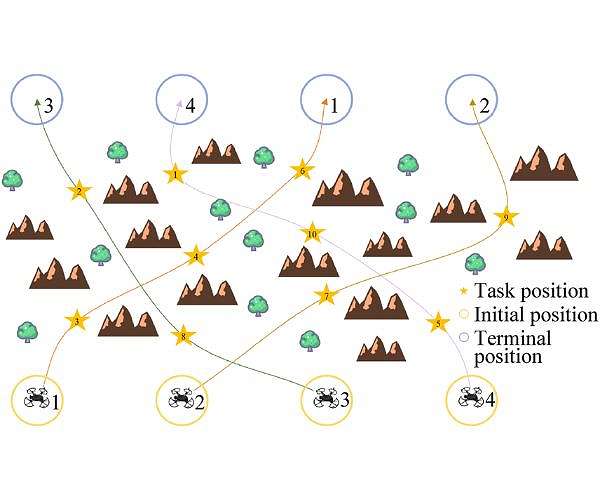
"Existing algorithms often face issues like being trapped in local optima and slow convergence when dealing with complex constraints," Chen explains. "We designed a comprehensive mathematical model covering task types, time windows, and UAV payloads, and proposed a three-layer encoding scheme (task sequence, UAV sequence, waiting time) to accurately describe assignment schemes."
In the EL-HH framework, a hyper-heuristic controller learns how to select and combine lower-level optimization operators using an energy learning strategy. By continually updating the selection probabilities of these operators according to their historical performance, the algorithm emphasizes search directions that improve solution quality while still exploring alternative options.
The method uses multiple optimization operators together with directed graph-based procedures to adjust task ordering and timing. These mechanisms refine the assignment plans so that each UAV receives a feasible, collision-free route that respects mission timing and payload constraints while balancing workload across the swarm.
According to the study, the researchers tested the EL-HH algorithm in both simple and complex simulation environments as well as in real indoor experiments. Across these tests, EL-HH showed faster convergence and higher-quality solutions than particle swarm optimization, grey wolf optimization and several other conventional metaheuristics, particularly when the task set and constraint structure became more demanding.
The results indicate that heterogeneous UAV swarms guided by EL-HH can complete mission packages more efficiently while maintaining obstacle avoidance and constraint satisfaction. The authors report that the algorithm maintains robustness as problem size increases, which is critical for large-scale coordinated missions involving many drones and diverse task types.
"This study provides robust technical support for the cooperative operation of UAV swarms in complex scenarios," adds Chen. The team notes that such capabilities are relevant to reconnaissance, strike support, search and rescue and other operations in which multiple UAVs must coordinate in real time within dynamic airspace.
Looking ahead, the researchers plan to refine the hyper-heuristic layer to better adapt to rapidly changing battlefield conditions and uncertain task information. They highlight future directions that include integrating more sophisticated environment models, enhancing real-time responsiveness and extending the framework to fully distributed or partially decentralized swarm control architectures.
Research Report: Energy learning hyper-heuristic algorithm for cooperative task assignment of heterogeneous UAVs under complex constraints
